数据库
极限编程
药物化学
rabbitmq
C语言数组实例
机制与策略
循环
pycharm
硬件设备
SylixOS
Nacos
应届生就业
测试开发
基础入门
软件定义汽车
数据压缩
DBA
比较两个宽字符串的字符
媒体
.Net6
costmap
2024/4/13 8:55:14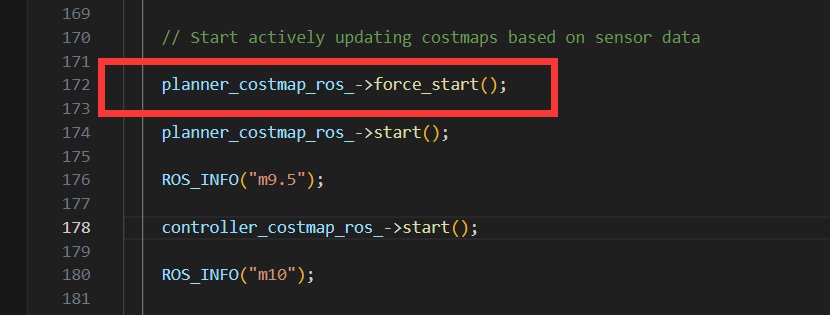
ROS机器人启动move base时代价地图概率性无法加载的原因及解决方法
最近,使用ROS机器人,在启动move_base 节点时,概率性会出现全局和局部代价地图不加载的问题,此时,发布目标点也无法启动路径规划。而且该问题有时候出现概率很低,比如启动10次,会有1次发送该情况…
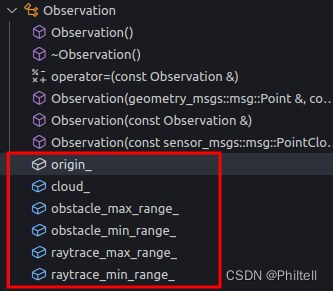
基于ROS2的costmap中Obstacle Layer中对障碍物信息的增加与删除机制的方案调研。
文章目录 1.背景2.目标3. 障碍物信息添加方式发送数据的数据结构与接收数据的数据结构 4. 障碍物清理机制4.1 可调参数4.2 优化光追算法4.3 障碍物跟踪 1.背景
基于costmap地图,使用navigation导航时,会出现由于激光雷达/图像测距的局限性, …